


I hold a a PhD, an MEng, and an SB in Electrical Engineering and Computer Science and an SB in Physics, all from the Massachusetts Institute of Technology.
I pride myself on my versatility, in both my willingness to work and study in new fields and my ability to contribute across disciplines. My diverse skill-set has enabled me to independently take both personal and professional projects from concept to completion and leaves me uniquely positioned to address issues of electromechanical integration and project planning.
I currently offer electronic and mechanical design services through my company Unboxed Systems, LLC.


-
Robotic Knee Brace
2008-2012
MIT Biomechatronics Group
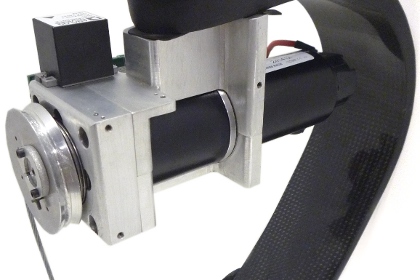
Human dynamics are dominated by inertia and elastic energy storage, not by the rigid trajectory control commonly found in robotic systems. This brace replicates the spring-clutch behavior of the human knee, unburdening the biological system with possible applications ranging from increased stamina to decreased pain.
The system consists of a high-torque clutch in series with a composite leaf spring. Due to the constraints of wearable devices, the design of this device focused on minimizing size and weight and off-the-shelf clutch designs were deemed unsuitable. With the aid of Andrew Marecki and a number of other undergraduate engineers under my leadership, I designed a robotic exoskeletal knee joint including a custom dog clutch with an integrated planetary transmission. I also designed onboard electronics tightly integrated with the mechanical system as well as control systems within LegOS to operate the system safely and reliably. Notably, no sensors are necessary outside the body of the robotic joint and, because non-contact sensing is used internally, only a single wire connects the easily separated mechanical and electrical subassemblies.
In the fall of 2011, I carried out a series of biomechanics experiments investigating the influence of this device on metabolic demand, joint kinetics and kinematics, and muscle activation.
This work formed the basis of my doctoral thesis in Electrical Engineering and Computer Science (Biomedical Sciences and Engineering Area) at MIT and was presented at the Dynamic Walking conference. A patent and several publications are pending.

-
LegOS
2007-2012
MIT Biomechatronics Group
Wearable robotic systems require complex control strategies and a host of sensors and actuator controllers, but any practical implementation must be small, light-weight, and draw little power. Moreover, many biomechanists are unfamiliar with the design of embedded software and require a sandboxed and simplified environment with easy debugging and diagnostics. I wrote LegOS to address these problems.
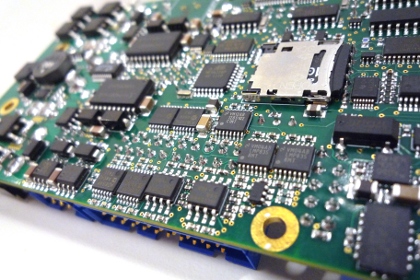
Designed to run on AVR microcontrollers, LegOS implements a hard real-time system with a user-space similar to that of PLCs, with mechanisms for implementing state machines and feedback controllers, while low-level control and timing are handled transparently. An onboard debugger with companion MATLAB software makes diagnostics easy.
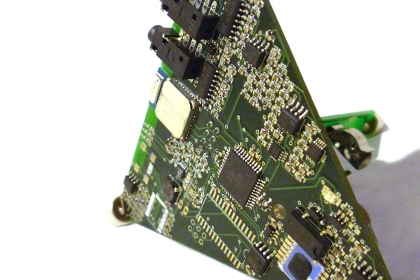
LegOS is easily configurable to support different hardware through the use of a modular device architecture. I've also designed a development board, offering most common features, and built custom hardware for a number of devices. The current LegOS development board provides two motor controllers, four encoder counters, a six degree-of-freedom inertial unit, two differential analog inputs with programmable gain, four analog inputs with programmable input filtering, a real-time clock, battery protection and charging, and debugging via USB or onboard flash memory.
To date, LegOS has controlled at least seven wearable robotics projects and has been critical to the successful completion of two doctoral theses.
-
Disco Dance Floor
2005-2010
Personal Project
In January of 2005, Michael Anderson, Schuyler Senft-Grupp, Scott Torborg, and I built a 512 tile computer-controlled disco floor with 12-bit color in an MIT dorm lounge, for under $3,000. Following the inevitable publicity, we marketed the electronics, primarily to hobbyists.
Fueled by this success and seeing weaknesses in the state of professional lighting control, I then set out to design a novel lighting control system, called the Digital Lighting System (DLS), based on a fiber optic communications bus. I implemented the DLS protocol on an FPGA and designed a number of new lighting devices, including a modular easy-to-install replacement to the first generation disco floor hardware called Cobalt. I also designed injection molded housings for Cobalt and oversaw small-scale production.
To elegantly control the potentially millions of RGB LEDs enabled by the DLS bus, I wrote Light Director, a software package intended to bring the disc jockey model to lighting with interactive animations which automatically adapt to the three-dimensional configuration of the DLS equipment in use.

-
Eternal Footman
2007-2012
Personal Project
The MIT Mystery Hunt is an annual team competition consisting of hundreds of puzzles, each of which comes without instructions and may take hundreds of man hours to solve. Competing effectively requires tremendous breadth of knowledge, sharp instincts, and patience. Or one very good computer program.
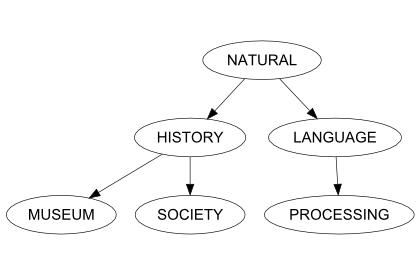
The Eternal Footman partially automates the process of searching for meaningful English phrases by extracting and sorting letters from a large collection of data using natural language processing techniques. Armed with a semantic database of words and phrases in common use and a syntactic database representing the relative frequencies of one, two, and three word sequences, the Eternal Footman can parse together phrases that both meet the constraints of a given puzzle and are likely to be meaningful English.
A skilled human solver is typically able to complete a puzzle after acquiring three quarters of the necessary information; the Eternal Footman often needs no more than half. As data-mining can take hours - and sometimes even requires solving other puzzles in their entirety - this savings can be enormous.
Eternal Footman is written in C# and designed so that search tools may be loaded at runtime. I've released an API to my team so that anyone may contribute a tool and the feature set grows each year.
-
Foot Prosthesis for Running
2007-2008
MIT Biomechatronics Group
Amputee runners have become very competitive, thanks in large part to the introduction of efficient carbon fiber spring feet optimized for running and sprinting. Though these devices are clearly an improvement over their predecessors, they still lag behind the human ankle and foot in one clear way - the biological system actively contributes energy to the gait cycle. I designed a proof-of-concept active prosthesis for running to address this weakness.
An electric motor in parallel with an extremely stiff spring acts to reduce the device's effective stiffness as the wearer contacts the ground. After maximum compression, the motor is disengaged and the wearer is propelled upward with extra energy stored in the spring.
-
Knee Prosthesis
2007-2011
MIT Biomechatronics Group
Above-the-knee amputees suffer significantly impaired mobility and increased metabolic demand of locomotion. Cutting edge devices emulate the dissipative phases of the human knee, but not the augmentative phases - a failure particularly noticeable in tasks such as stair ascent. Moreover, cutting edge devices built with traditional robotic approaches require a great deal of power. To address these problems, Ernesto Martinez and Jeff Weber designed a biomimetic knee prosthesis consisting of two antagonistic motors with series elastic elements. I designed electronics running LegOS with low level feedback systems and consulted on higher level control strategies.

-
Owl Project
2006-2007
MIT Ecology Media Group
Performing a census of owls is particularly difficult because they are extremely territorial and sparse. Fortunately their calls carry for miles. I designed an electronic system for localizing these calls using acoustic time of flight between a set of four microphones. To do this accurately with a small inter-microphone spacing, I devised an algorithm to calculate time delay of arrival with sub-sample resolution in a computationally inexpensive fashion. The device also records atmospheric data to be correlated with the movements of target owls.
This work formed the basis of my master's thesis in Electrical Engineering and Computer Science at MIT.
-
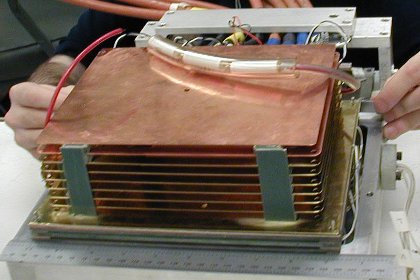
Time Projection Chamber
2003-2006
MIT Electromagnetic Interactions Group
A time projection chamber reconstructs the path of a charged particle by detecting electrons produced by ionization of gas in the chamber. Two dimensions are reconstructed based on the locations at which electrons impact a plane of electrodes while the third is determined from time delay of arrival of the electrons drifting in a known gas and electric field. If a magnetic field is also added, the radius of curvature of the particle can be used to determine its mass. In order to calibrate such a chamber, a pulsed ultraviolet laser can be used to produce ionization events, simulating the passage of a charged particle traveling in a perfectly straight line, independently of any ambient magnetic field.
I retrofitted an existing time projection chamber with such a calibration system by designing a laser control system and a new chamber housing with ultraviolet-transparent windows. I also improved instrumentation of the z-axis using CAMAC components and LabView, developed new reconstruction algorithms in MATLAB, and built a system to confirm the laser profile in three dimensions by manipulating a pyroelectric joulemeter.
This work formed the basis of my bachelor's thesis in Physics at MIT.
-
Firefly
2005-2006
Personal Project
Quadrotor flying platforms offer the hovering capability of a rotary-wing aircraft like a helicopter without the associated mechanical complexity. Unfortunately, mechanical simplicity comes at the cost of control complexity - in effect trading development cost for manufacturing cost.
I designed Firefly, a quadrotor 28" in diameter, for my bachelor's degree in Electrical Engineering and Computer Science at MIT.
